mBot: Monter le robot mBot
mBot: Monter le robot mBot
- Objectifs
- Etre capable de monter le robot mBot
- Introduction
- Le robot mBot est simple à utiliser permettant des expériences pratiques avec son logiciel par programmation graphique.
- C’est un robot complet pouvant très bien être utilisé pour l’apprentissage de la robotique et des disciplines STEM (science, technologie, ingénierie et mathématiques).
- La construction du mBot est vraiment très facile, seules 45 pièces sont à assembler pour construire ce robot en 20 minutes.
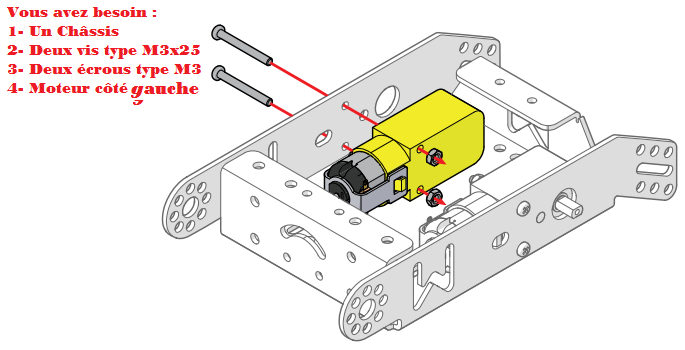
- Assembler le premier moteur
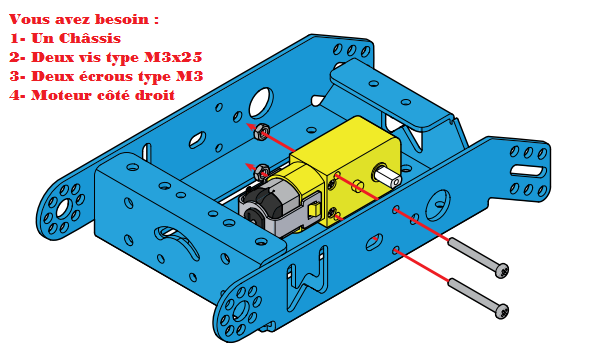
- Pour assembler le moteur côté droit, vous avez besoin de
- Assembler le premier moteur
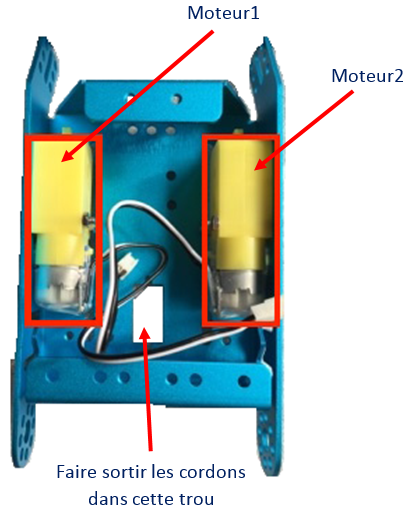
- Vous obtiendrez le résultat suivant :
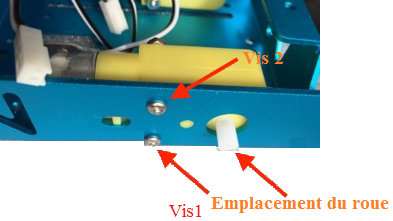
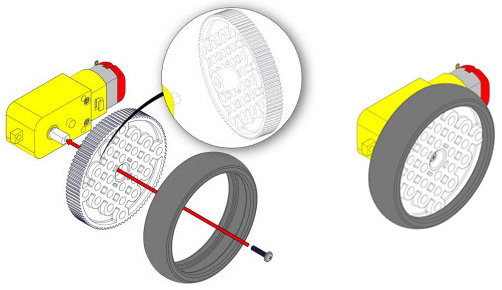
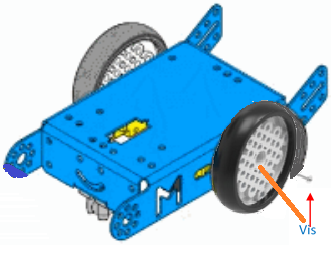
- Assembler les deux roues
- Vissez le module directionnel (capteur de suivi de ligne)
- Vissez le module directionnel sur le châssis, à l’avant du robot, puis connectez le câble RJ25 sur le module.
- Vous avez besoin : Deux vis, roue folle et le module directionnel
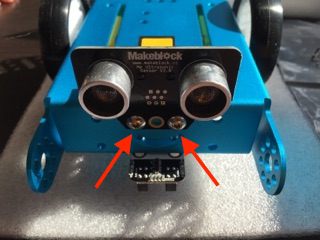
- Vissez les capteurs ultrasons
- Retournez le châssis, puis vissez les capteurs ultrasons.
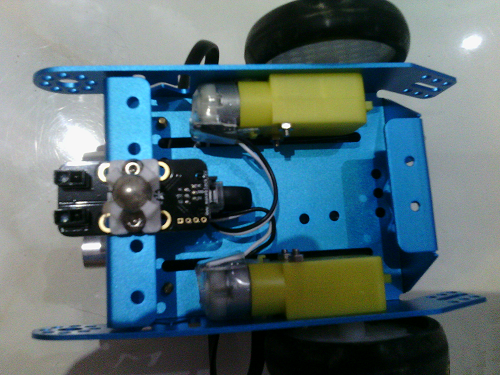
- Passage des câbles
- Passez le câble RJ25 du module directionnel
- Passez l’alimentation de chaque moteur, de l’autre côté du châssis, pour que l’on puisse les connecter au mCore (Carte électronique).
- Connectez le câble RJ25 des capteurs à ultrasons (2).
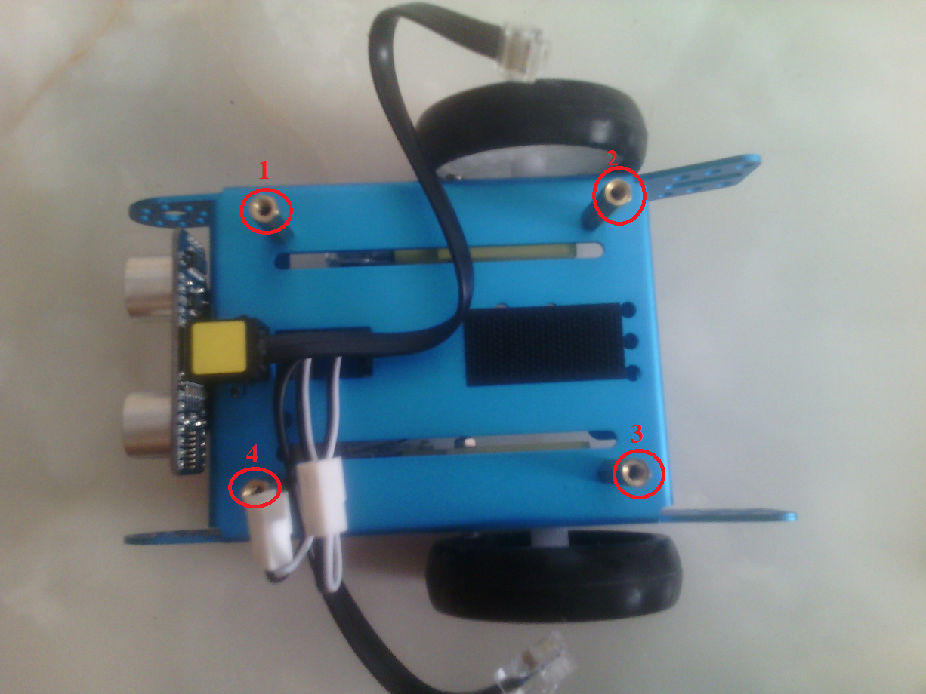
- Vissez les 4 Goujons de cuivre
- Vissez les 4 Goujons de cuivre sur le dessus du châssis dans.
- Faite les tourner avec les doigts à droite.
- Passez l’alimentation de chaque moteur, de l’autre côté du châssis, pour que l’on puisse les connecter au mCore (Carte électronique).
- Connectez le câble RJ25 des capteurs à ultrasons (2).
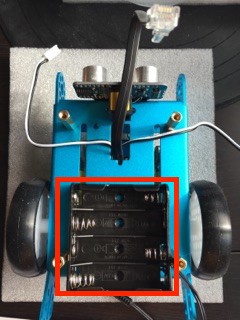
- Installez le compartiment à piles
- Installez le compartiment à piles, avec du scratch.
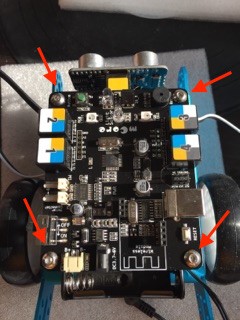
- Vissez le mCore sur le châssis.
- Vissez sur les goujons de cuivre, le mCore sur le châssis à l’aide avec les 4 vis.
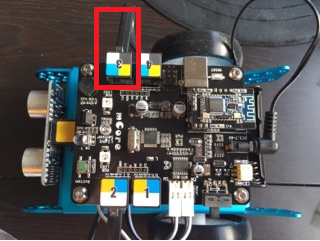
- Connectez le module Bluetooth.
- Connectez le module Bluetooth sur le mCore.
- Respectez le sens de connexion !
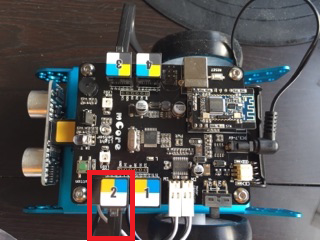
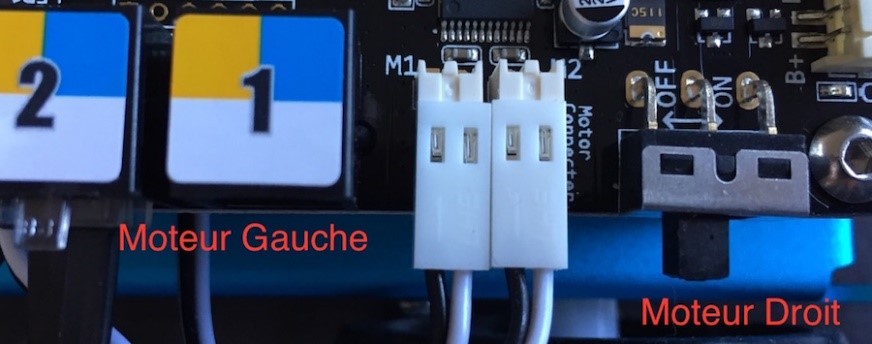
- Branchement des câbles.
- Connectez le câbles RJ25 qui vient du capteur à ultrasons sur la prise 3 du mCore.
- Connectez le câble sur votre gauche sur la prise M1.
- Connectez le câble sur votre droite sur la prise M2.

-
• Châssis de votre mBot
• Deux vis type M3x25
• Deux écrous type M3
• Moteur côté droit
• Essayer d’entrer le moteur dans son propre trou sur le côté droit de châssis.
• Lier le moteur au châssis avec les deux vis et les deux écrous en les passant dans le moteur.
• Deux vis type M3x25 • Deux écrous type M3 • Moteur côté gauche • Essayer d’entrer le moteur dans son propre trou sur le côté gauche de châssis. • Lier le moteur au châssis avec les deux vis et les deux écrous en les passant dans le moteur.
|