
mBot: Les composants du robot mBot
Sommaire
mBot: Les composants du robot mBot
-
Objectifs
- Connaître les composants de mBot bleu
-
Introduction
- Le robot mBot est un robot d’apprentissage pour apprendre, la programmation graphique basée sur Scratch 2.0 et Arduino IDE (PC et Mac), l’apprentissage de la robotique et de l’électronique.
- Le robot mBot est composée de diverses structures mécaniques en aluminium anodisé de couleur « bleue » associées à 2 moteurs à courant continu, à des roues à pneus gomme, à une roue folle, à une platine programmable compatible arduino et à différents modules périphériques.
- Le robot mBot est composée essentiellement :
- Entrées : capteur de lumière, bouton, récepteur infrarouge, capteur ultrasonique, suiveur de ligne
- Sorties : avertisseur sonore, DEL RVB, émission infrarouge, deux ports moteurs
- Microcontrôleur : basé sur Arduino Uno
- Alimentation : batterie CC de 3,7 V au lithium (chargeur ou carte) ou quatre piles AA de 1,5 V (non incluses)
- Communication sans fil : série sans fil à 2,4 GHz Connection sans fil avec smartphone ou PC grâce au système bluetooth (smartphone non fourni)
-
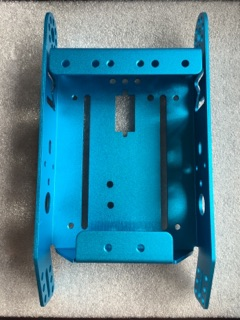
Le châssis
- Structures mécaniques en aluminium anodisé de couleur « bleue »
- Châssis robuste en aluminium de 2 mm d’épaisseur, compatible avec les éléments Makeblock et Lego
-
Deux moteurs à courant continu
- Deux motoréducteurs à courant continu avec leurs encodeurs optiques.
- « Le principe d’un encodeur optique est assez simple, il va nous permettre de contrôler très précisément la vitesse et l’avancée de notre moteur. L’objectif est de pouvoir asservir son système robotisé, une partie puissance ainsi qu’un PID intégré permet de contrôler indépendamment la vitesse de chaque moteur. »
- Spécifications techniques
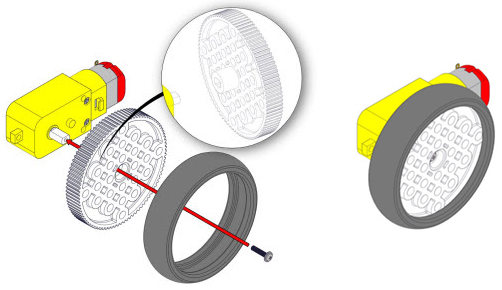
- Ce bloc moteur-réducteur (livré seul avec sa visserie) dispose d’un arbre compatible avec les pignons plastiques 90T pouvant faire office de roue (en utilisant des pneus gommes optionnels).
- Module de détection ultrason « Ultrasonic Sensor »
- Idéalement conçu pour la réalisation de petits robots mobiles ludiques, ce module fait office de capteur ultrason capable de détecter un obstacle se trouvant à une distance comprise entre 3 cm et 4 m (avec un angle d’environ 30°).
- Le module est livré avec un code source conçu pour les plate-formes programmables Makeblock ou arduino™.
- Il dispose d’un connecteur RJ25 vous permettant de le relier (via un cordon à ajouter) rapidement et sans soudure à une platine de développement Makeblock.
- Le module dispose de 3 trous de fixation ainsi que d’une led de visualisation et d’une protection contre les court-circuit.
- À noter également la présence de 3 pastilles au pas de 2.54 mm vous permettant de récupérer les signaux de ce dernier en soudant des connecteurs (non livrés) pour une utilisation universelle si nécessaire.
- Roues à pneus gomme
- 2 Roue plastique 90T
- 125 dents
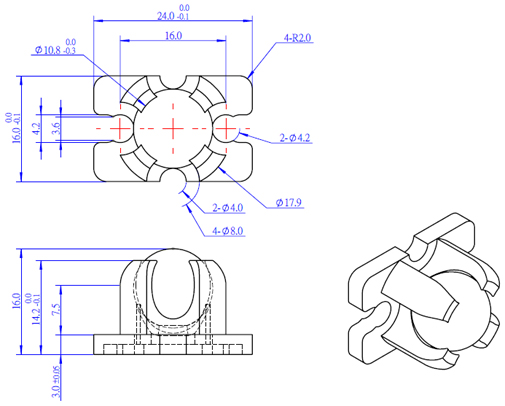
- Roue folle
- Une roue folle ou « ball caster » en plastique injecté d’une seul pièce (pour une meilleur solidité une fixation simplifié) avec bille en métal.
- Hauteur ajustable à 10 ou 16mm
- Châssis ABS et bille en acier
- permettant un mouvement sur 360°.
- Boîtier en plastique.
- Poids: 20 g
- Une carte de pilotage


| Tension de fonctionnement | 6V |
|---|---|
| Puissance | TB6612PNG |
| Rapport de réduction | 46 |
| Consommation (par moteur) | 550mA |
| Interface | Connecteur RJ25 |
| Vitesse (à vide) | 200 RPM ± 10% |
| Poids | 40 g |

|

|
Nomenclature moteur mBot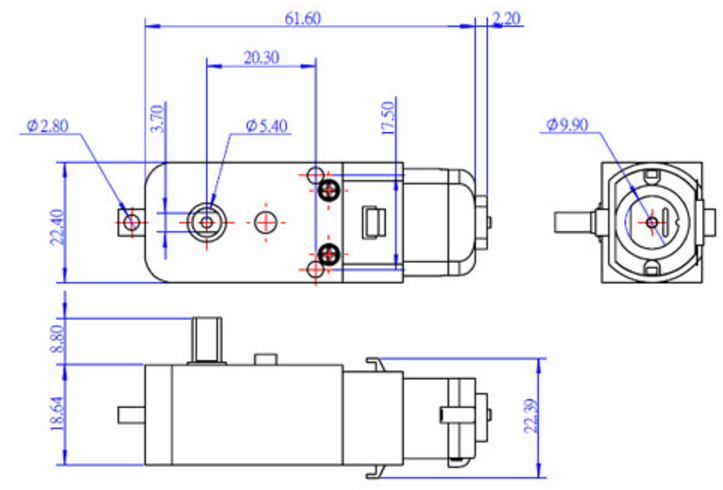
|

|

|

|
|

|
|
2.D’un bouton-poussoir 3.De deux LED RGB 4.D’une LED d’émission IR 5.D’un buzzer 6.D’un capteur de lumière 7.D’un capteur IR 8.2 connecteurs RJ45 libres pour connecter d’autres modules Makeblock. |